TOF激光雷達和三角測距,誰才是掃地機器人的睛彩視界?
發表時間: 2022-07-05 14:00:01
瀏覽:
當掃地機器人要在陌生環境中實現自主移動時
它主要面臨三個問題:
第一個是定位問題,在一個環境中,掃地機器人需要知道自身的位置。
第二個是地圖構建問題,機器人在一個陌生環境中移動,需要進行地圖的構建,認識周邊環境。
第三個是路徑規劃問題,根據已有的地圖和已知的自身位置,實現自主移動。
激光雷達是掃地機器人感知外部環境的眼睛,掃地機器人通過激光雷達獲取環境點雲數據,從而繪製環境地圖,為室內定位和路徑導航奠定基礎。
隨著傳感器技術的發展,激光雷達技術也達到全新的水平,從原理上看目前主流的有飛行時間測距(TOF)和三角測距兩種。
何為飛行時間測距(TOF)?
簡單來說,就是計算光的“飛行時間”。
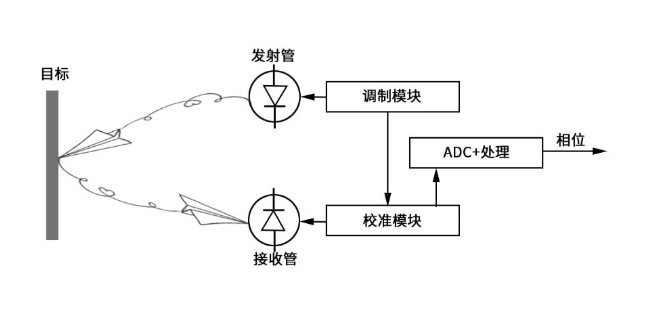
由激光器發射一個激光脈衝,通過計時器記錄下光的出射和回返的時間,兩個時間相減即可得到光的“飛行時間”,而光速是固定的,根據已知速度和時間就可以計算出距離。
何為三角測距?
三角測距采用激光器發射激光,在照射到物體之後,反射光會由線性CCD接收,因為激光器和探測器間隔了一段距離,所以根據光學路徑,不同距離的物體將會在CCD上成像在不同的位置,按照三角公式進行計算,就可以推導出被測物體的距離。
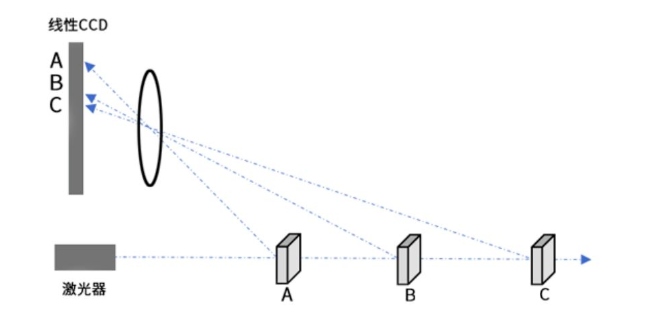
從原理上來說,三角測距的目標物體距離越遠,在CCD上的位置差別就越小,以緻於在超過某個距離後,CCD幾乎無法分辨,而TOF激光雷達采用脈衝激光采樣,並且還能嚴格控製視場以減少環境光的影響,可以測量的距離更遠。

激光雷達的采樣率決定了每一幀圖像的點雲數目以及點雲的角分辨率,點雲數越多,角分辨率越高,則圖像對周圍環境的描繪就越細緻。
三角測距激光雷達在測量距離比較遠的時候,精度迅速下降,一般隻能在短距離範圍內使用.而TOF激光雷達是依賴飛行時間,時間測量精度並不隨著長度增加有明顯變化,因此大多數TOF激光雷達在幾十米的測量範圍內都能保持超高精度。

在長途運輸過程中,存儲溫度和振動對雷達可靠性的影響不容忽視。特別是出口海運,集裝箱裏溫度往往會超過70℃。相比TOF激光雷達,三角測距激光雷達更容易受溫度和振動的影響,精度出現不良的概率比TOF激光雷達要高很多。
TOF激光雷達雖然已經成為掃地機器人中的“王牌”,但在實際應用時還是會遇到一些挑戰,並且相比三角測距法,TOF要攻克的難關要難得多.

點擊右上角
分享給朋友吧







 長按圖片保存/分享
長按圖片保存/分享
0
你的喜歡,就是我堅持寫下去的能量器
好文推薦
已有1人推薦
-

長按二維碼關注
 郵箱:sales@lidar-tech.com
郵箱:sales@lidar-tech.com
聯系電話:027-63499189
地址:武漢市洪山區東湖高新佳園路創業廣場7-5棟留學生創業園集成電路產業中心4148室
Copyright @ LEANTOOL All Rights Reserved